The effect of additional processors on performance is dominated by certain characteristics of the specific workload being handled. This section discusses those critical characteristics and their effects.
The following terms are used to describe the extent to which an existing program has been modified, or a new program designed, to operate in an SMP environment:
Multiprogramming operating systems running heavy workloads on fast computers give our human senses the impression that several things are happening simultaneously. In fact, many demanding workloads do not have large numbers of dispatchable threads at any given instant, even when running on a single-processor system where serialization is less of a problem. Unless there are always at least as many dispatchable threads as there are processors, one or more processors will be idle part of the time.
The number of dispatchable threads is the total number of threads in the system
A workload can be said to be multiprocessable to the extent that it presents at all times as many dispatchable threads as there are processors in the system. Note that this does not mean simply an average number of dispatchable threads equal to the processor count. If the number of dispatchable threads is zero half the time and twice the processor count the rest of the time, the average number of dispatchable threads will equal the processor count, but any given processor in the system will be working only half the time.
Increasing the multiprocessability of a workload involves one or both of the following:
These solutions are not independent. If there is a single, major system bottleneck, increasing the number of threads of the existing workload that pass through the bottleneck will simply increase the proportion of threads waiting. If there is not currently a bottleneck, increasing the number of threads may create one.
Real workloads do not scale perfectly on an SMP system. Some factors that inhibit perfect scaling are as follows:
All of these factors contribute to what is called the scalability of a workload. Scalability is the degree to which workload throughput benefits from the availability of additional processors. It is usually expressed as the quotient of the throughput of the workload on a multiprocessor divided by the throughput on a comparable uniprocessor. For example, if a uniprocessor achieved 20 requests per second on a given workload and a four-processor system achieved 58 requests per second, the scaling factor would be 2.9. That workload is highly scalable. A workload that consisted exclusively of long-running, compute-intensive programs with negligible I/O or other kernel activity and no shared data might approach a scaling factor of 3.2 to 3.9 on a 4-way system. However, most real-world workloads would not. Because scalability is very difficult to estimate, scalability assumptions should be based on measurements of authentic workloads.
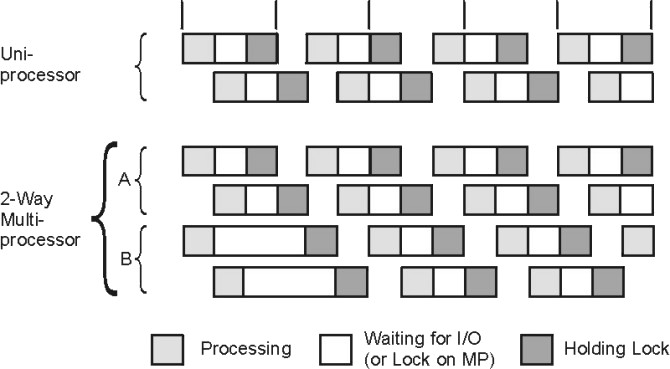
The following figure illustrates the problems of scaling. The workload consists of a series of hypothetical commands. Each command is about one-third normal processing, one-third I/O wait, and one-third processing with a lock held. On the uniprocessor, only one command can actually be processing at a time, regardless of whether the lock is held. In the time interval shown (five times the standalone execution time of the command), the uniprocessor handles 7.67 of the commands.
On the multiprocessor, two processors handle program execution, but there is still only one lock. For simplicity, all of the lock contention is shown affecting processor B. In the period shown, the multiprocessor handles 14 commands. The scaling factor is thus 1.83. We stop at two processors because more would not change the situation. The lock is now in use 100 percent of the time. In a four-way multiprocessor, the scaling factor would be 1.83 or less.
Real programs are seldom as symmetrical as the commands in the illustration. In addition we have only taken into account one dimension of contention: locking. If we had included cache-coherency and processor-affinity effects, the scaling factor would almost certainly be lower.
This example illustrates that workloads often cannot be made to run faster simply by adding processors. It is also necessary to identify and minimize the sources of contention among the threads.
Scaling is workload-dependent. Some published benchmark results imply that high levels of scalability are easy to achieve. Most such benchmarks are constructed by running combinations of small, CPU-intensive programs that use almost no kernel services. These benchmark results represent an upper bound on scalability, not a realistic expectation.
Another interesting point to note for benchmarks is that in general, a one-way SMP will run slower (about 5-15 percent) than the equivalent uniprocessor running the UP version of the operating system.
A multiprocessor can only improve the execution time of an individual program to the extent that the program can run in multithreaded mode. There are several ways to achieve parallel execution of parts of a single program:
Unless one or more of these techniques is used, the program will run no faster in a multiprocessor system than in a comparable uniprocessor. In fact, because it may experience more locking overhead and delays due to being dispatched to different processors at different times, it may be slower.
Even if all of the applicable techniques are exploited, the maximum improvement is limited by a rule that has been called Amdahl's Law:
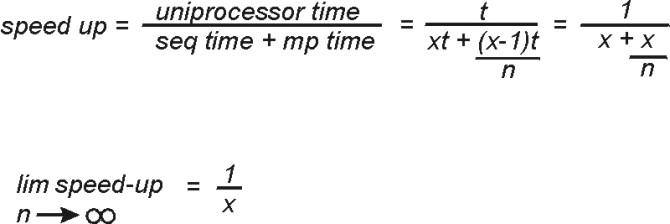
As an example, if 50 percent of a program's processing must be done sequentially, and 50 percent can be done in parallel, the maximum response-time improvement is less than a factor of 2 (in an otherwise-idle 4-way multiprocessor, it is at most 1.6).