Normally, an application programmer thinks of the running program as an uninterrupted sequence of instructions that perform a specified function. Great amounts of inventiveness and effort have been expended on the operating system and hardware to ensure that programmers are not distracted from this idealized view by irrelevant space, speed, and multiprogramming or multiprocessing considerations. If the programmer is seduced by this comfortable illusion, the resulting program might be unnecessarily expensive to run and might not meet its performance objectives.
To examine clearly the performance characteristics of a workload, a dynamic, rather than a static, model of program execution is needed, as shown in the following figure.
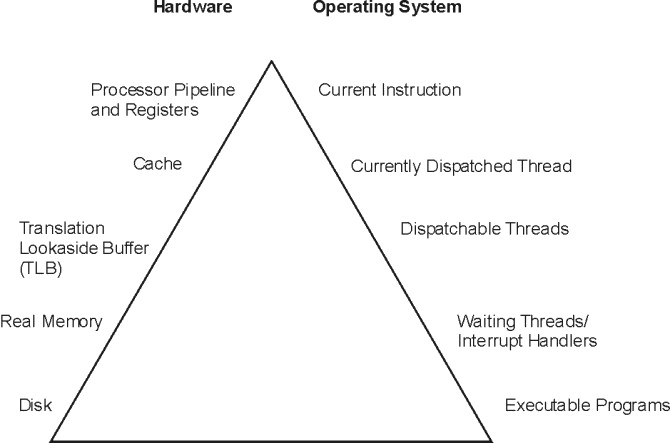
Figure 1-1. Program Execution Hierarchy. The figure is a triangle on its base. The left side represents hardware entities that are matched to the appropriate operating system entity on the right side. A program must go from the lowest level of being stored on disk, to the highest level being the processor running program instructions. For instance, from bottom to top, the disk hardware entity holds executable programs; real memory holds waiting operating system threads and interrupt handlers; the translation lookaside buffer holds detachable threads; cache contains the currently dispatched thread and the processor pipeline and registers contain the current instruction.
|
To run, a program must make its way up both the hardware and operating-system hierarchies, more or less in parallel. Each element in the hardware hierarchy is scarcer and more expensive than the element below it. Not only does the program have to contend with other programs for each resource, the transition from one level to the next takes time. To understand the dynamics of program execution, you need a basic understanding of each of the levels in the hierarchy.
Usually, the time required to move from one hardware level to another consists primarily of the latency of the lower level (the time from the issuing of a request to the receipt of the first data).
The slowest operation for a running program (other than waiting for a human keystroke) on a standalone system is obtaining code or data from a disk, for the following reasons:
Disk operations can have many causes besides explicit read or write requests in the program. System-tuning activities frequently prove to be hunts for unnecessary disk I/O.
Real Memory, often referred to as RAM, is fast compared to disk, but much more expensive per byte. Operating systems try to keep in RAM the code and data that are currently in use, spilling any excess onto disk (or never bringing them into RAM in the first place).
RAM is not necessarily fast compared to the processor. Typically a RAM latency of dozens of processor cycles occurs between the time the hardware recognizes the need for a RAM access and the time the data or instruction is available to the processor.
If the access is to a page of virtual memory that has been spilled to disk (or has not been brought in yet), a page fault occurs, and the execution of the program is suspended until the page has been read in from disk.
One of the ways programmers are insulated from the physical limitations of the system is the implementation of virtual memory. The programmer designs and codes the program as though the memory were very large, and the system takes responsibility for translating the program's virtual addresses for instructions and data into the real addresses that are needed to get the instructions and data from RAM. Because this address-translation process can be time-consuming, the system keeps the real addresses of recently accessed virtual-memory pages in a cache called the translation lookaside buffer (TLB).
As long as the running program continues to access a small set of program and data pages, the full virtual-to-real page-address translation does not need to be redone for each RAM access. When the program tries to access a virtual-memory page that does not have a TLB entry (a TLB miss), dozens of processor cycles (the TLB-miss latency) are usually required to perform the address translation.
To minimize the number of times the program has to experience the RAM latency, systems incorporate caches for instructions and data. If the required instruction or data is already in the cache (a cache hit), it is available to the processor on the next cycle (that is, no delay occurs). Otherwise (a cache miss), the RAM latency occurs.
In some systems, there are two or three levels of cache, usually called L1, L2, and L3. If a particular storage reference results in an L1 miss, then L2 is checked. If L2 generates a miss, then the reference goes to the next level, either L3 if present or RAM.
Cache sizes and structures vary by model, but the principles of using them efficiently are identical.
A pipelined, superscalar architecture makes possible, under certain circumstances, the simultaneous processing of multiple instructions. Large sets of general-purpose registers and floating-point registers make it possible to keep considerable amounts of the program's data in registers, rather than continually storing and reloading.
The optimizing compilers are designed to take maximum advantage of these capabilities. The compilers' optimization functions should always be used when generating production programs, however small the programs are. The Optimization and Tuning Guide for XL Fortran, XL C and XL C++ describes how programs can be tuned for maximum performance.
To run, a program must also progress through a series of steps in the software hierarchy.
When a user requests a program to run, the operating system performs a number of operations to transform the executable program on disk to a running program. First, the directories in the user's current PATH environment variable must be scanned to find the correct copy of the program. Then, the system loader (not to be confused with the ld command, which is the binder) must resolve any external references from the program to shared libraries.
To represent the user's request, the operating system creates a process, which is a set of resources, such as a private virtual address segment, required by any running program.
In AIX Version 4, the operating system also automatically creates a single thread within that process. A thread is the current execution state of a single instance of a program. In AIX Version 4, access to the processor and other resources is allocated on a thread basis, rather than a process basis. Multiple threads can be created within a process by the application program. Those threads share the resources owned by the process within which they are running.
Finally, the system branches to the entry point of the program. If the program page that contains the entry point is not already in memory (as it might be if the program had been recently compiled, executed, or copied), the resulting page-fault interrupt causes the page to be read from its backing storage.
The mechanism for notifying the operating system that an external event has taken place is to interrupt the currently running thread and transfer control to an interrupt handler. Before the interrupt handler can run, enough of the hardware state must be saved to ensure that the system can restore the context of the thread after interrupt handling is complete. Newly invoked interrupt handlers experience all of the delays of moving up the hardware hierarchy (except page faults). Unless the interrupt handler was run very recently (or the intervening programs were very economical), it is unlikely that any of its code or data remains in the TLBs or the caches.
When the interrupted thread is dispatched again, its execution context (such as register contents) is logically restored, so that it functions correctly. However, the contents of the TLBs and caches must be reconstructed on the basis of the program's subsequent demands. Thus, both the interrupt handler and the interrupted thread can experience significant cache-miss and TLB-miss delays as a result of the interrupt.
Whenever an executing program makes a request that cannot be satisfied immediately, such as an I/O operation (either explicit or as the result of a page fault), that thread is put in a wait state until the request is complete. Normally, this results in another set of TLB and cache latencies, in addition to the time required for the request itself.
When a thread is dispatchable, but not actually running, it is accomplishing nothing useful. Worse, other threads that are running may cause the thread's cache lines to be reused and real memory pages to be reclaimed, resulting in even more delays when the thread is finally dispatched.
The scheduler chooses the thread that has the strongest claim to the use of the processor. The considerations that affect that choice are discussed in Performance Overview of the CPU Scheduler. When the thread is dispatched, the logical state of the processor is restored to the state that was in effect when the thread was interrupted.
Most of the machine instructions are capable of executing in a single processor cycle, if no TLB or cache miss occurs. In contrast, if a program branches rapidly to different areas of the program and accesses data from a large number of different areas, causing high TLB and cache-miss rates, the average number of processor cycles per instruction (CPI) executed might be much greater than one. The program is said to exhibit poor locality of reference. It might be using the minimum number of instructions necessary to do its job, but consuming an unnecessarily large number of cycles. In part because of this poor correlation between number of instructions and number of cycles, reviewing a program listing to calculate path length no longer yields a time value directly. While a shorter path is usually faster than a longer path, the speed ratio can be very different from the path-length ratio.
The compilers rearrange code in sophisticated ways to minimize the number of cycles required for the execution of the program. The programmer seeking maximum performance must be primarily concerned with ensuring that the compiler has all the information necessary to optimize effectively, rather than trying to second-guess the compiler's optimization techniques (see Effective Use of Preprocessors and the Compilers). The real measure of optimization effectiveness is the performance of an authentic workload.